PEIBOS
The PEIBOS tool provides a way to compute the Parallelepipedic Enclosure of the Image of the BOundary of a Set.
Let us consider an initial set \(\mathbb{X}_0 \subset \mathbb{R}^n\) with its boundary \(\partial \mathbb{X}_0\). Considering a function \(\mathbf{f}:\mathbb{R}^n \to \mathbb{R}^p\), \(n \leq p\), the PEIBOS tool allows to compute the set \(\mathbf{Y}=\left\{ \mathbf{f}(\mathbf{x}) \mid \mathbf{x} \in \partial \mathbb{X}_0 \right\}\).
Gnomonic atlas
To handle the boundary of the initial set \(\mathbb{X}_0\), the PEIBOS tool relies on a gnomonic atlas.
A gnomonic atlas of \(\partial \mathbb{X}_0\) is composed of the inverse chat \(\psi_0\) and a set of symmetries \(\Sigma\) such that:
where \(m\) is the dimension of the boundary \(\partial \mathbb{X}_0\), \(m < n\).
Example
Consider the case where \(\mathbb{X}_0\) is the unit disk. Its boundary \(\partial \mathbb{X}_0\) is the unit circle \(\mathcal{S}^1\).
The image of \(\left[-1,1\right]\) by the function
gives a quarter of \(\mathcal{S}^1\). If we define \(s\) the rotation of \(\frac{\pi}{2}\), \(\mathcal{S}^1\) can be covered by the gnomonic atlas \(\left\{\psi_0,\left\{1,s,s^2,s^{-1}\right\}\right\}\) as shown below.

Use
The PEIBOS function takes at least four arguments :
The studied analytic function.
The inverse chart for the gnomonic atlas (an analytic function).
The list of symmetries for the gnomonic atlas. Note that each symmetry is represented as a hyperoctahedral symmetry, see sec-actions-octasym.
A resolution \(\epsilon\). The initial box \(\left[-1,1\right]^m\) will initiallly be splitted in boxes with a diameter smaller than \(\epsilon\).
Eventually an offset vector can be specified if the initial set is not centered around the origin.
Eventually a flag can be set to True to get the verbose.
For each of the small box \(\left[\mathbf{x}\right]\), the PEIBOS algorithm uses the Parallelepiped inclusion function to enclose \(\mathbf{f}\left(\sigma\left(\psi_0\left( \left[\mathbf{x}\right] \right)\right) + \text{offset}\right)\)
It returns a vector of Parallelepiped. Their union is an outer approximation of \(\mathbf{f}\left(\partial \mathbb{X}_0\right)\).
The full signature of the function is :
-
std::vector<Parallelepiped> codac2::PEIBOS(const AnalyticFunction<VectorType> &f, const AnalyticFunction<VectorType> &psi_0, const std::vector<OctaSym> &Sigma, double epsilon, const Vector &offset, bool verbose = false)
Compute a set of parallelepipeds enclosing \(\mathbf{f}(\sigma(\psi_0([-1,1]^m)) + offset) \) for each symmetry \(\sigma\) in the set of symmetries \(\Sigma\). Note that \(\left\{\psi_0,\Sigma\right\}\) form a gnomonic atlas.
- Parameters:
f – The analytic function \(\mathbf{f}:\mathbb{R}^n\rightarrow\mathbb{R}^p,p\geq n\)
psi_0 – The transformation function \(\psi_0:\mathbb{R}^m\rightarrow\mathbb{R}^n\) to construct the atlas
Sigma – The set of symmetry operators \(\sigma\) to construct the atlas
epsilon – The maximum diameter of the boxes to split \([-1,1]^m\) before computing the parallelepiped inclusions
offset – The offset to add to \(\sigma(\psi_0([-1,1]^m))\) (used to translate the initial manifold)
verbose – If true, print the time taken to compute the parallelepiped inclusions with other statistics
- Returns:
A vector of Parallelepipeds enclosing \(\mathbf{f}(\sigma(\psi_0([-1,1]^m))+ offset)\) for each symmetry \(\sigma\) in the set of symmetries \(\Sigma\).
Examples
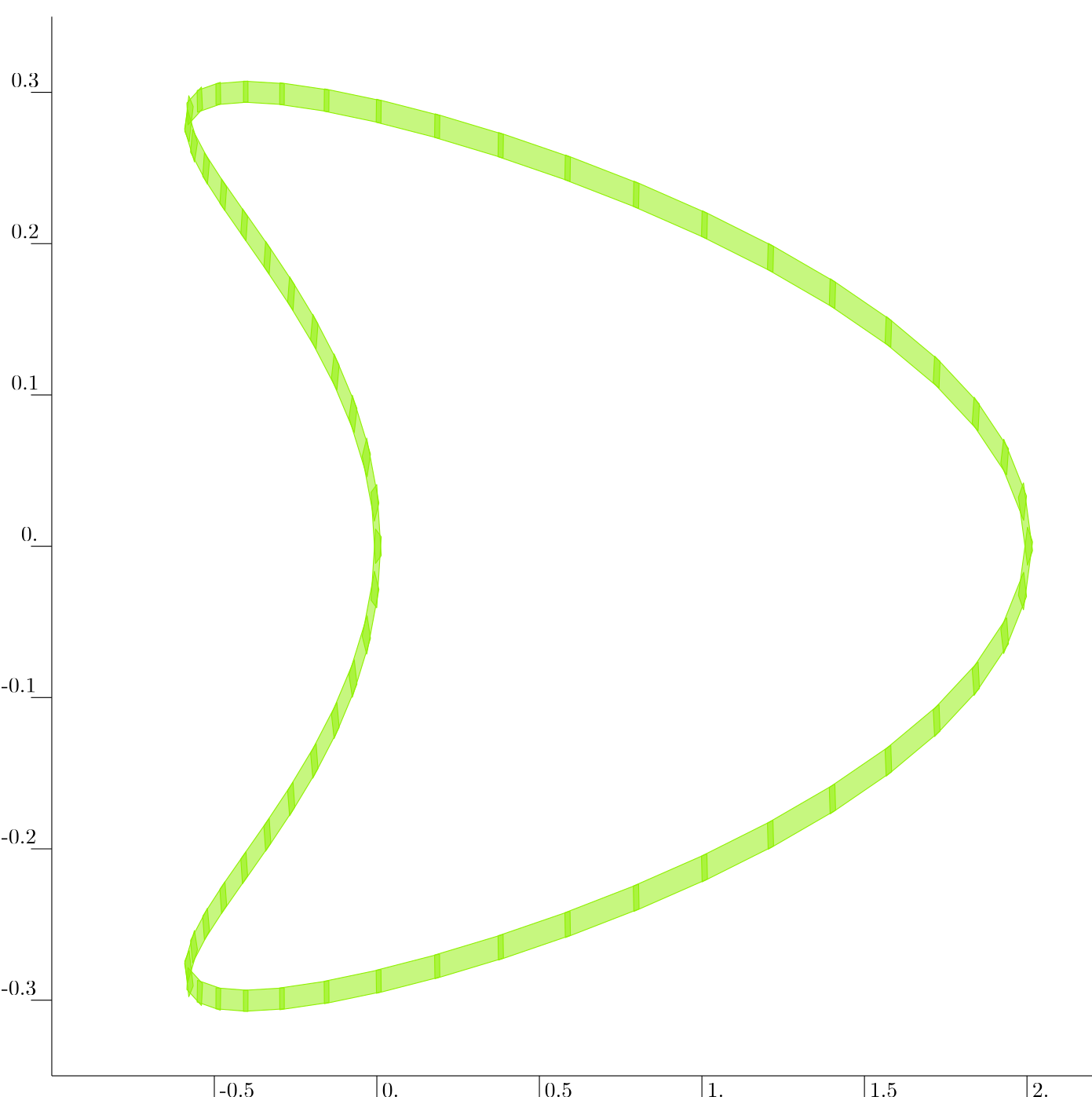
2D : Henon map
Say that we want to compute the image of the unit circle by the Henon map defined by
The corresponding code is:
# Definition of f
y_2d = VectorVar(2)
a,b = 1.4,0.3
f_2d = AnalyticFunction([y_2d],[y_2d[1]+1-a*sqr(y_2d[0]),b*y_2d[0]])
# Definition of the gnomonic atlas
X_2d = VectorVar(1)
psi0_2d = AnalyticFunction([X_2d],[sin(X_2d[0]*PI/4.),cos(X_2d[0]*PI/4.)])
id_2d = OctaSym([1, 2])
s = OctaSym([-2, 1])
# Call to PEIBOS
v_par_2d = PEIBOS(f_2d,psi0_2d,[id_2d,s,s*s,s.invert()],0.2)
// Definition of f
VectorVar y_2d(2);
double a = 1.4; double b = 0.3;
AnalyticFunction f_2d({y_2d},{y_2d[1]+1-a*sqr(y_2d[0]),b*y_2d[0]});
// Definition of the gnomonic atlas
VectorVar X_2d(1);
AnalyticFunction psi0_2d ({X_2d},{sin(X_2d[0]*PI/4.),cos(X_2d[0]*PI/4.)});
OctaSym id_2d ({1,2});
OctaSym s ({-2,1});
// Call to PEIBOS
auto v_par_2d = PEIBOS(f_2d, psi0_2d, {id_2d,s,s*s,s.invert()}, 0.2);
% Definition of f
y_2d=VectorVar(2);
a=1.4;
b=0.3;
f_2d = AnalyticFunction({y_2d},vec(y_2d(2)+1-a*sqr(y_2d(1)),b*y_2d(1)));
% Definition of the gnomonic atlas
X_2d = VectorVar(1);
psi0_2d = AnalyticFunction({X_2d},vec(sin(X_2d(1)*PI/4.),cos(X_2d(1)*PI/4.)));
id_2d = OctaSym(int64([1,2]));
s = OctaSym(int64([-2,1]));
% Call to PEIBOS
v_par_2d = PEIBOS(f_2d,psi0_2d,{id_2d,s,s*s,s.invert()},0.2);
The result is
3D
Say that we want to compute the image of the unit sphere by the function defined by
The corresponding code is:
# Definition of f
y_3d = VectorVar(3)
f_3d = AnalyticFunction([y_3d],[sqr(y_3d[0])-sqr(y_3d[1])+y_3d[0],2*y_3d[0]*y_3d[1]+y_3d[1],y_3d[2]])
# Definition of the gnomonic atlas
X_3d = VectorVar(2)
psi0_3d = AnalyticFunction([X_3d],[1/sqrt(1+sqr(X_3d[0])+sqr(X_3d[1])),X_3d[0]/sqrt(1+sqr(X_3d[0])+sqr(X_3d[1])),X_3d[1]/sqrt(1+sqr(X_3d[0])+sqr(X_3d[1]))])
id_3d = OctaSym([1, 2, 3])
s1 = OctaSym([-2, 1, 3])
s2 = OctaSym([3, 2, -1])
# Call to PEIBOS
v_par_3d = PEIBOS(f_3d,psi0_3d,[id_3d,s1,s1*s1,s1.invert(),s2,s2.invert()],0.2)
// Definition of f
VectorVar y_3d(3);
AnalyticFunction f_3d({y_3d},{sqr(y_3d[0])-sqr(y_3d[1])+y_3d[0],2*y_3d[0]*y_3d[1]+y_3d[1],y_3d[2]});
// Definition of the gnomonic atlas
VectorVar X_3d(2);
AnalyticFunction psi0_3d ({X_3d},{1/sqrt(1+sqr(X_3d[0])+sqr(X_3d[1])),X_3d[0]/sqrt(1+sqr(X_3d[0])+sqr(X_3d[1])),X_3d[1]/sqrt(1+sqr(X_3d[0])+sqr(X_3d[1]))});
OctaSym id_3d ({1,2,3});
OctaSym s1 ({-2,1,3});
OctaSym s2 ({3,2,-1});
// Call to PEIBOS
auto v_par_3d = PEIBOS(f_3d, psi0_3d, {id_3d,s1,s1*s1,s1.invert(),s2,s2.invert()}, 0.2);
% Definition of f
y_3d = VectorVar(3);
f_3d = AnalyticFunction({y_3d},vec(sqr(y_3d(1))-sqr(y_3d(2))+y_3d(1),2*y_3d(1)*y_3d(2)+y_3d(2),y_3d(3)));
% Definition of the gnomonic atlas
X_3d = VectorVar(2);
psi0_3d = AnalyticFunction({X_3d},vec(1/sqrt(1+sqr(X_3d(1))+sqr(X_3d(2))),X_3d(1)/sqrt(1+sqr(X_3d(1))+sqr(X_3d(2))),X_3d(2)/sqrt(1+sqr(X_3d(1))+sqr(X_3d(2)))));
id_3d = OctaSym(int64([1,2,3]));
s1 = OctaSym(int64([-2, 1, 3]));
s2 = OctaSym(int64([3, 2, -1]));
% Call to PEIBOS
v_par_3d = PEIBOS(f_3d,psi0_3d,{id_3d,s1,s1*s1,s1.invert(),s2,s2.invert()},0.2);
The result is