The CtcDist contractor
Main author: Simon Rohou
-
class CtcDist : public codac2::Ctc<CtcDist, IntervalVector>
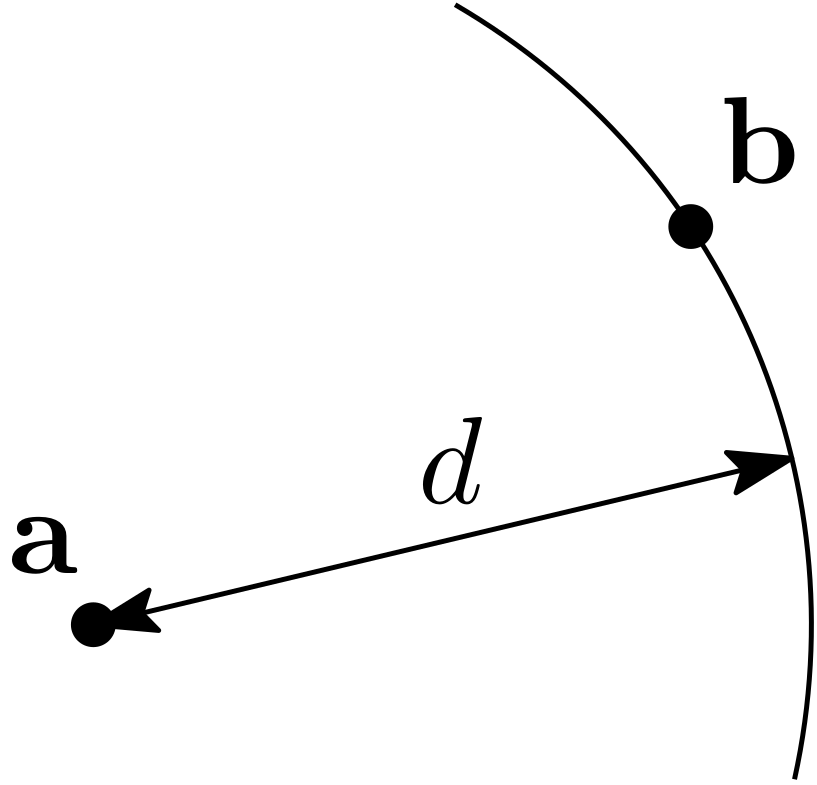
Implements the distance constraint on \(\mathbf{a}\in\mathbb{R}^2\), \(\mathbf{b}\in\mathbb{R}^2\) and \(d\in\mathbb{R}\) such that:
\[d^2=(a_1-b_1)^2+(a_2-b_2)^2. \]The contractor can be applied either on a 5d box or on a set of five intervals.
This contractor is minimal.
Methods
-
void codac2::CtcDist::contract(IntervalVector &x) const
Applies \(\mathcal{C}_{\textrm{dist}}\big([\mathbf{x}]\big)\).
- Parameters:
x –
IntervalVectorfor \((a_1,a_2,b_1,b_2,d)^\intercal\)
x = IntervalVector([[2,5],[2,6],[0,0],[0,0],[1,3]])
c = CtcDist()
x = c.contract(x)
# x = [ [2, 2.23607] ; [2, 2.23607] ; <0, 0> ; <0, 0> ; [2.82842, 3] ]
IntervalVector x({{2,5},{2,6},{0,0},{0,0},{1,3}});
CtcDist c;
c.contract(x);
// x = [ [2, 2.23607] ; [2, 2.23607] ; <0, 0> ; <0, 0> ; [2.82842, 3] ]
-
void codac2::CtcDist::contract(Interval &a1, Interval &a2, Interval &b1, Interval &b2, Interval &d) const
Applies \(\mathcal{C}_{\textrm{dist}}\big([a_1],[a_2],[b_1],[b_2],[d]\big)\).
- Parameters:
a1 –
Intervalfor \(a_1\)a2 –
Intervalfor \(a_2\)b1 –
Intervalfor \(b_1\)b2 –
Intervalfor \(b_2\)d –
Intervalfor \(d\)
a1,a2,b1,b2,d = Interval(2,5),Interval(2,6),Interval(0),Interval(0),Interval(1,3)
c = CtcDist()
a1,a2,b1,b2,d = c.contract(a1,a2,b1,b2,d)
# a1 = [2, 2.23607] ; a2 = [2, 2.23607] ; b1 = <0, 0> ; b2 = <0, 0> ; d = [2.82842, 3]
Interval a1(2,5), a2(2,6), b1(0), b2(0), d(1,3);
CtcDist c;
c.contract(a1,a2,b1,b2,d);
// a1 = [2, 2.23607] ; a2 = [2, 2.23607] ; b1 = <0, 0> ; b2 = <0, 0> ; d = [2.82842, 3]
Example of use with a paver
A static robot located at \(\mathbf{x}=(0,0)^\intercal\) receives range-only (distance) signals from two landmarks located at \(\mathbf{b}^{(1)}=(1,2)^\intercal\) and \(\mathbf{b}^{(2)}=(3.6,2.4)^\intercal\). The observation equation \(y^{(i)}=g^{(i)}(\mathbf{x})\) is given by:
where \(\mathbf{b}^{(i)}\) is the \(i\)-th landmark emitting range-only signals.
We assume that two distances are received from the landmarks. Considering bounded uncertainties, we state the actual observations are bounded as:
from \(\mathbf{b}^{(1)}\), \(y^{(1)}\in[2,2.4]\)
from \(\mathbf{b}^{(2)}\), \(y^{(2)}\in[4.1,4.5]\)
The \(\mathcal{C}_{\textrm{dist}}\) applies on 5d boxes but we are only interested in paving the \((x_1,x_2)\) space, so we will project the distance contractors associated with each landmark on \((x_1,x_2)\) using \(\mathcal{C}_{\textrm{proj}}\). The projection is restricted to the measurements and the position of the landmarks.
b1, b2 = Vector([1,2]), Vector([3.6,2.4])
y1, y2 = Interval(2,2.4), Interval(4.1,4.5)
c = CtcDist() # generic distance contractor
c1 = CtcProj(c, [0,1], cart_prod(b1,y1)) # projection involving data
c2 = CtcProj(c, [0,1], cart_prod(b2,y2))
Vector b1({1,2}), b2({3.6,2.4});
Interval y1(2,2.4), y2(4.1,4.5);
CtcDist c; // generic distance contractor
CtcProj c1(c, {0,1}, cart_prod(b1,y1)); // projection involving data
CtcProj c2(c, {0,1}, cart_prod(b2,y2));
Finally, we pave the intersection of each projected contractor.
DefaultFigure.pave( # calling a paver algorithm for graphic output
[[-3,5],[-2.5,5.5]], # initial 2d box
c1 & c2, # intersection of the two projected contractors
0.1 # paver precision
)
DefaultFigure.draw_ring(b1, y1)
DefaultFigure.draw_ring(b2, y2)
DefaultFigure.draw_circle([0,0], 0.1, [Color.red(),Color.red()])
DefaultFigure::pave( // calling a paver algorithm for graphic output
{{-3,5},{-2.5,5.5}}, // initial 2d box
c1 & c2, // intersection of the two projected contractors
0.1 // paver precision
);
DefaultFigure::draw_ring(b1, y1);
DefaultFigure::draw_ring(b2, y2);
DefaultFigure::draw_circle({0,0}, 0.1, {Color::red(),Color::red()});
We obtain the following approximation:
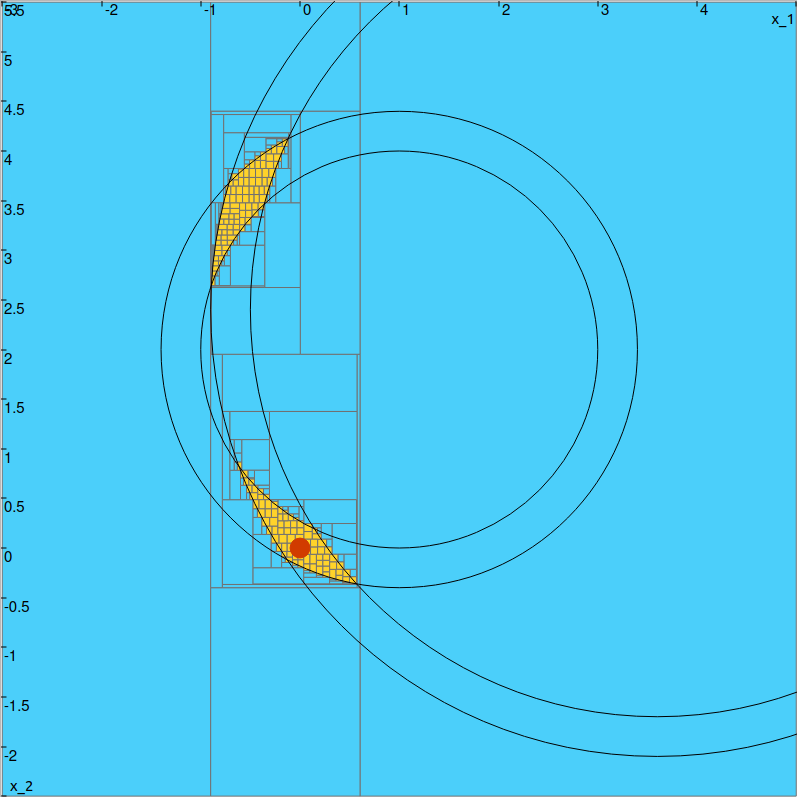
Outer approximation of the feasible position set.
Technical documentation
See the C++ API documentation of this class.