See also
This manual refers to Codac v1, but a new v2 implementation is currently in progress… an update of this manual will be available soon. See more.
CtcDist: \(\sqrt{x^2+y^2}=d\)
The \(\mathcal{C}_{\textrm{dist}}\) contractor is mainly used in robotics to express the distance constraint \(d\) between two vectors \(\mathbf{a}\) and \(\mathbf{b}\). Its implementation currently stands on the \(\mathcal{C}_{\mathbf{f}}\) contractor previously presented.
Definition
Important
ctc.dist.contract(a, b, d)
ctc::dist.contract(a, b, d);
Optimality
This contractor is optimal.
Example
Suppose that we want to estimate the distance \(d\) between a vector \(\mathbf{x}=(0,0)^\intercal\) and several vectors \(\mathbf{b}^1\), \(\mathbf{b}^2\), \(\mathbf{b}^3\).
We define domains (intervals and boxes):
\([d]=[7,8]\)
\([\mathbf{x}]=[0,0]^2\)
\([\mathbf{b}^1]=[1.5,2.5]\times[4,11]\)
\([\mathbf{b}^2]=[3,4]\times[4,6.5]\)
\([\mathbf{b}^3]=[5,7]\times[5.5,8]\)
d = Interval(7,8)
x = IntervalVector(2,Interval(0))
b1 = IntervalVector([[1.5,2.5],[4,11]])
b2 = IntervalVector([[3,4],[4,6.5]])
b3 = IntervalVector([[5,7],[5.5,8]])
Interval d(7.,8.);
IntervalVector x(2,0.);
IntervalVector b1{{1.5,2.5},{4,11}};
IntervalVector b2{{3,4},{4,6.5}};
IntervalVector b3{{5,7},{5.5,8}};
Several calls to \(\mathcal{C}_{\textrm{dist}}\) will allow the contraction of both the \([\mathbf{b}^i]\) and \([d]\). Because domains are involved in several contractions, an iterative contraction loop is necessary in order to reach a consistency state (in our case, two iterations are sufficient):
ctc_dist = CtcDist()
for i in range(0,2): # iterative contractions
ctc_dist.contract(x, b1, d)
ctc_dist.contract(x, b2, d)
ctc_dist.contract(x, b3, d)
# note that we could also use directly the ctc.dist object already available
CtcDist ctc_dist;
for(int i = 0 ; i < 2 ; i++) // iterative contractions
{
ctc_dist.contract(x, b1, d);
ctc_dist.contract(x, b2, d);
ctc_dist.contract(x, b3, d);
}
// note that we could also use directly the ctc::dist object already available
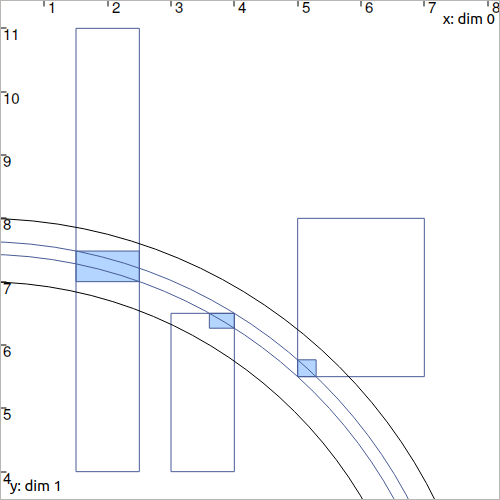
Fig. 16 Illustration of several contracted boxes with the above ctc_dist contractor. The blue boxes have been contracted as well as the ring.
Technical documentation
See the C++ API documentation of this class.