See also
This manual refers to Codac v1, but a new v2 implementation is currently in progress… an update of this manual will be available soon. See more.
Tutorial: constraint programming for robotics
This tutorial is about Constraint Programming (CP), Interval Analysis (IA) and their applications to mobile robotics.
Constraint programming?
There are several ways to deal with state estimation in mobile robotics. The constraint programming approach consists in defining a problem as a set of rules and letting a solver perform the estimation. For mobile robotics, rules are constraints coming from state equations.
Efforts have been done to propose operators and solvers to apply these constraints. The goal of this tutorial is to learn how to use them and understand the efficiency of the approach on realistic robotic applications. We will see that some problems that are difficult to solve with conventional methods (Kalman filters, particle approaches) can be easily dealt with by constraint programming. This is for instance the case of poor observation measurements, time uncertainties, delays, or when the initial conditions of the system are not known.
The tutorial will stand on the Codac library, that provides tools for computations over sets of reals and trajectories. It has been designed to deal with dynamical systems defined by non-linear differential equations and involving constraints such as trajectory evaluations, time uncertainties or delays. These computations stand on interval analysis, a well suited tool that reliably propagates uncertainties.
Requirements
Prerequisite for attending the tutorial are:
basic knowledge of Python or C++ (the exercises are available in both languages);
although the tutorial is about state estimation, you do not need skills in Kalman or particle filters.
Content of the tutorial
A list of exercises is proposed with realistic robotic applications:
Step 0: (installation)
Before starting the tutorial, you can read some words about the concepts of Constraint Programming and Interval Analysis. This will give you a first glimpse of the philosophy of this tutorial.
To get ready, you need to install the Codac library on your computer. Please follow the related page of the manual to see how to do it:
Then, depending on your preference between C++ or Python, you can run some Hello World! program to be sure everything is working well so far:
Note
In case you encounter difficulties to install Codac on your computer, an alternative solution is to try Codac online with Repl.it. You will find more information on the following page:
Step 1:
Step 2:
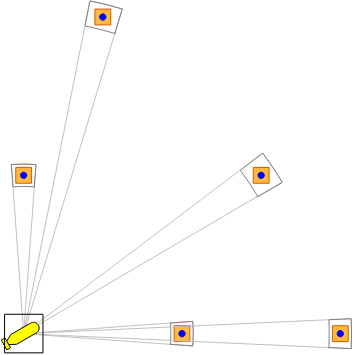
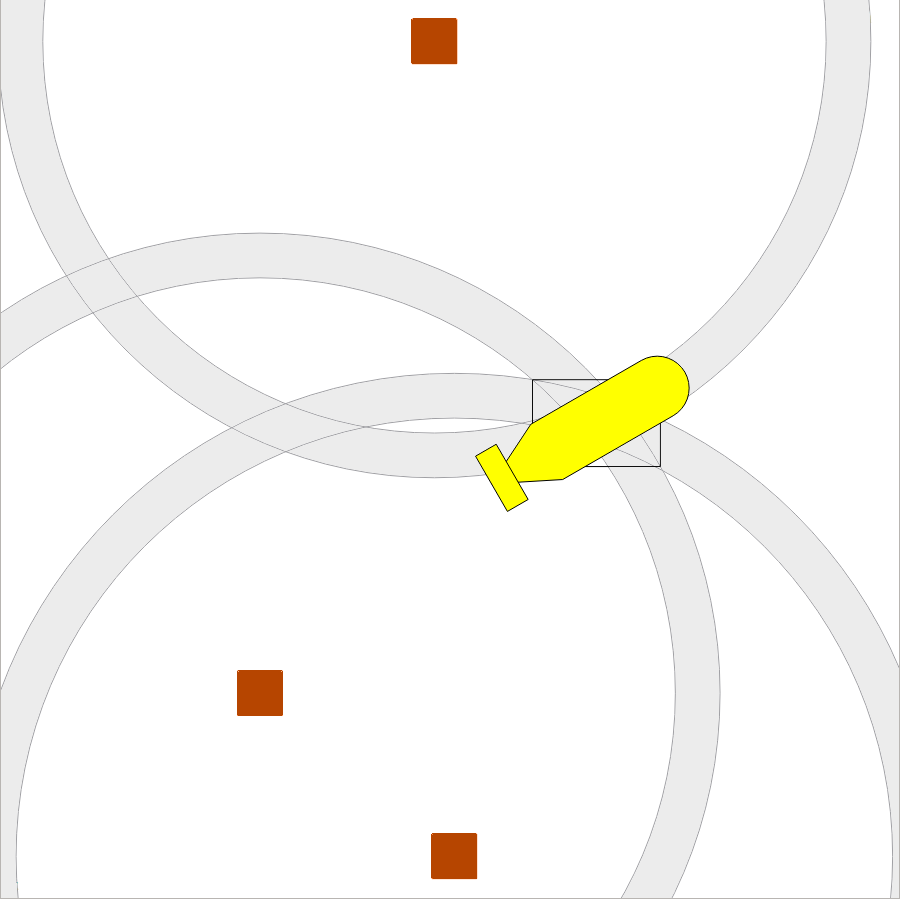
We will go a step further: now the landmarks are perceived with both range and bearing data. The resolution will involve new constraints, and a decomposition will be achieved. In the second part, we will tackle the problem of indistinguishable landmarks. We still assume that we know their position, but the robot is not able to make the association between the map and the observations. The goal of this exercise is to develop our own contractor to solve this problem.
Step 3:
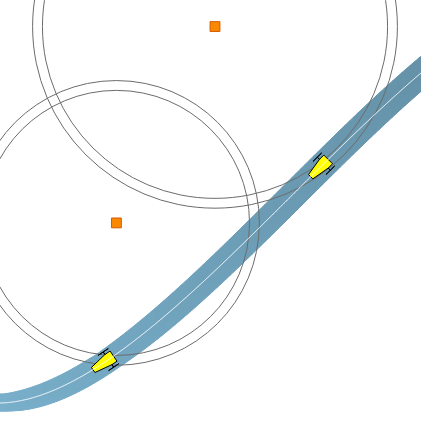
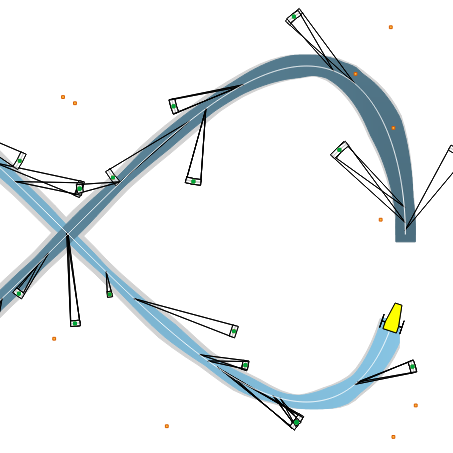
Now, we will make the robot move and see how we can handle uncertainties on trajectories. This will be done by solving the range-only problem of Lesson B, now in a dynamical context with asynchronous measurements.
Step 4:
The following video illustrates the result of Lesson H:
Organizers and technical support
|
For any question, do not hesitate to use the MOOC platform of this tutorial, so that other participants can reply or see posted answers.
Organizations
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()