codac2_geometry.h File Reference
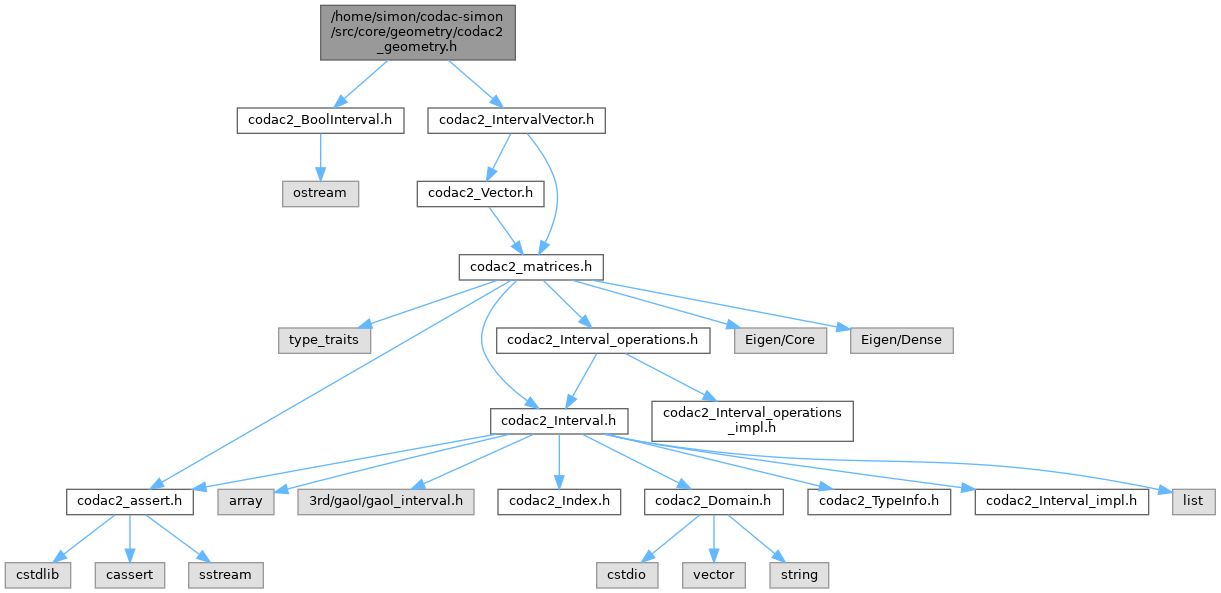
Include dependency graph for codac2_geometry.h:
Go to the source code of this file.
Namespaces | |
| namespace | codac2 |
Enumerations | |
| enum class | codac2::OrientationInterval { } |
| Enumeration representing feasible orientations. Can be used to assess an oriented angle, or the alignement of three points. More... | |
Functions | |
| std::ostream & | codac2::operator<< (std::ostream &os, const OrientationInterval &x) |
| Streams out a OrientationInterval. | |
| OrientationInterval | codac2::orientation (const IntervalVector &p1, const IntervalVector &p2, const IntervalVector &p3) |
| Computes the orientation of an ordered triplet of 2D points. | |
| BoolInterval | codac2::aligned (const IntervalVector &p1, const IntervalVector &p2, const IntervalVector &p3) |
| Checks whether three 2D points are aligned (colinear). | |
| std::vector< IntervalVector > | codac2::convex_hull (std::vector< IntervalVector > pts) |
| Computes the convex hull of a set of 2d points. | |
| IntervalVector | codac2::rotate (const IntervalVector &p, const Interval &a, const IntervalVector &c=Vector::zero(2)) |
| Rotates a 2D interval vector around a point by a given angle. | |
| template<typename T> | |
| T | codac2::rotate (const T &x, const Interval &a, const IntervalVector &c=Vector::zero(2)) |
| Rotates a 2D object (Segment, Polygon, etc) around a point by a given angle. | |
| void | codac2::merge_adjacent_points (std::list< IntervalVector > &l) |
| Merges overlapping or adjacent IntervalVector points within a list. | |
Detailed Description
- Date
- 2024
- Copyright
- Copyright 2024 Codac Team
- License: GNU Lesser General Public License (LGPL)
Generated by